
ここのところ「姿勢と動作」をテーマにした連載しております。第1部では「正常姿勢」が歴史的・文化的に変遷してきたこと、第2部では「日本人だからこの姿勢」とは言い切れず個人差の方が大きいこと、第3部では狩猟採集民の研究を通じて「唯一の正しい歩き方」は存在しないことをお伝えしてきました(以下、タップするとそれぞれの記事が開きます)。


ここで、こんな疑問が残るかもしれません。
そこで今回の第4部では、「エネルギー最小化原理」と「個人差」という2つのキーワードから、あなたにとっての”最適な”姿勢と歩行を科学的に考えていきたいと思います。
なお、現代の医学的・科学的観点で確認されている情報をベースにしていますが、科学知識は常に更新されます。あくまで参考程度にお読みいただき、ご自身の身体について不安な点がある場合は、必ず医療機関でご相談ください。
もくじ
骨格が「あなたの姿勢」を決めている
これまでの連載企画でも姿勢について触れてきましたが、今回は「姿勢の個人差」について、もう少し深く掘り下げてみましょう。
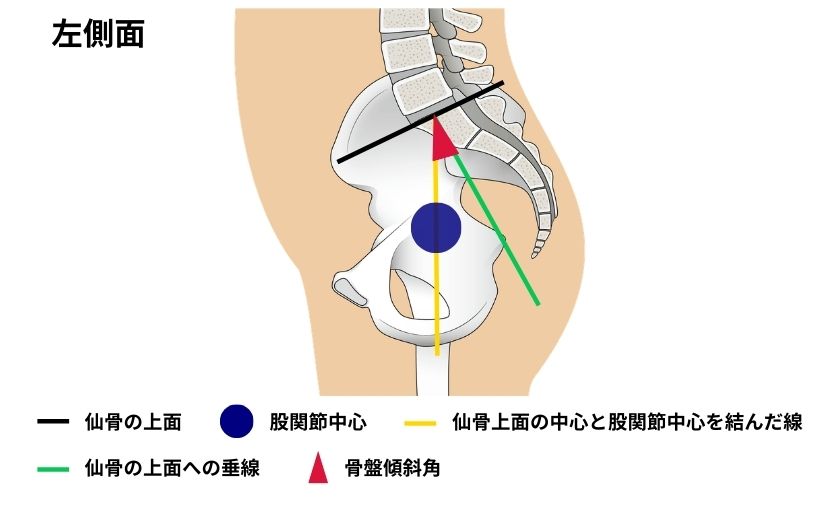
個人差の1つの指標:骨盤傾斜角(Pelvic Incidence:PI)
第2部でも触れましたが、姿勢の個人差は民族差よりも大きいことが分かっています。
この個人差の答えのひとつが骨盤傾斜角(もしくは骨盤固有角、Pelvic Incidence:PI)というものです。
PIとは、骨盤の形態学的特徴を表す生まれつきの角度です。専門的になりますが、仙骨上面の中心から股関節中心を結ぶ軸心線と、その軸心線に対する仙骨上縁の傾斜角です。
そしてこのPIは、成人では基本的に変わらない固定パラメータで、腰椎前弯のいわば「設計図」を決定します。
PIの個人差は想像以上に大きい
健常な成人のPIは33°から85°まで、非常に大きな幅があります。
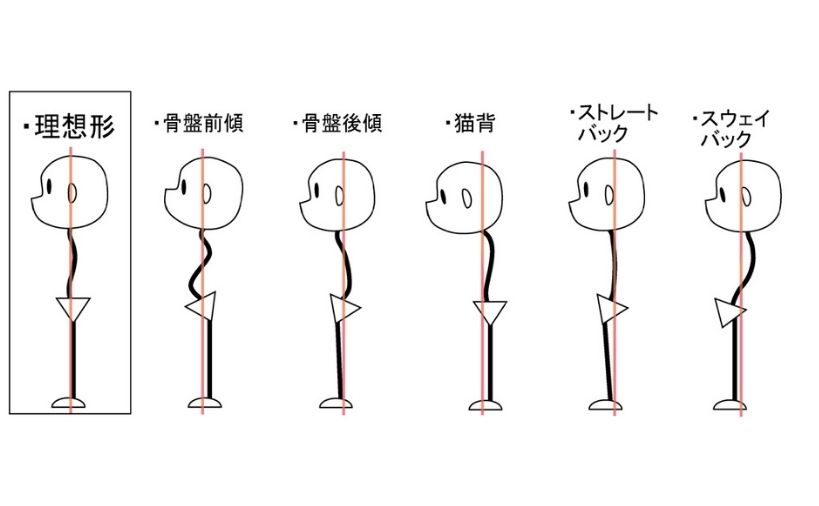
これがどれくらい大きな差かというと、PIが小さい人(例えば35°)は腰のカーブが浅い「フラットバック」型になりやすく、PIが大きい人(例えば70°)は腰のカーブが深い「ハイカーブ」型になりやすいのです。
フランスの脊椎外科医のRoussouly医師は、この個人差を4つのタイプに分類しました。
| タイプ | 骨盤傾斜角(PI)の目安 | 腰椎前弯の特徴 | 全体的な印象 |
|---|---|---|---|
| タイプ1 | 低い(約36〜41°) | 浅い前弯、頂点が低い位置 | 腰が平坦に見える |
| タイプ2 | やや低い(約39〜44°) | 浅い前弯、頂点がやや高い | やや平坦 |
| タイプ3 | 中程度(約50〜53°) | 中程度の前弯 | バランスの取れたカーブ |
| タイプ4 | 高い(約62〜67°) | 深い前弯 | 腰のカーブが強い |
※5カ国467名の無症状ボランティアを対象としたMEANS研究のデータに基づく
「正しい姿勢」は骨格によって違う
ここで重要なのは、PIが小さい人が「腰をもっと反らせて」と言われても、骨格的にそうならない(なれない)可能性があるのです。逆に、PIが大きい人が「反り腰を直しなさい」と言われても、その人にとってはそのカーブが”正常”である可能性があります。
2006年に発表されたLegayeらの研究では、PIが腰椎前弯の大きさを予測する最も重要な因子であることが確認されています。
つまり、あなたの「正しい」腰のカーブは、あなたの骨盤の形が(少なくとも一部分は)決めているのです。
さらに2022年の有限要素モデル研究では、Roussoulyのタイプによって腰椎にかかる力学的な負荷の分布が大きく異なることが示されています。タイプ3・4(前弯が深い)は各椎間の回転が均等に分散される傾向がある一方、タイプ1・2(前弯が浅い)は特定の椎間(特に第5腰椎と第1仙椎)に回転が集中しやすいのです。
このことは、「この姿勢が良い」という画一的なアドバイスが必ずしも万人に当てはまるわけではないことを強く示唆しています。
変えられる骨盤の傾斜
PIは骨盤の形態学的特徴のために基本的に不変である一方、日常で意識できる骨盤の傾き具合があり、これは立位・運動で調整可能です。これにはさまざまな指標がありますが、よく用いられる指標として以下の2つがあります。
- 股関節の付け根の上にある骨の出っ張り(上前腸骨棘:じょうぜんちょうこつきょく)と骨盤の後ろの骨の出っ張り(上後腸骨棘:じょうこうちょうこつきょく)を結んだ線と水平面とのなす角度。
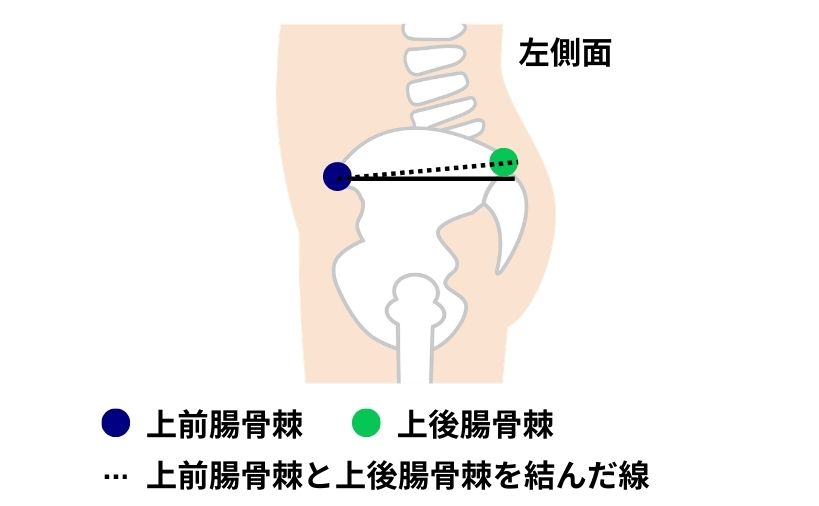
これを基準にした場合、上前腸骨棘よりも上後腸骨棘の方が指2〜3本分高い状態が立位姿勢で理想の骨盤の傾きとされています。
- 左右の上前腸骨棘と恥骨結合を結んだ三角形の面と床との角度。
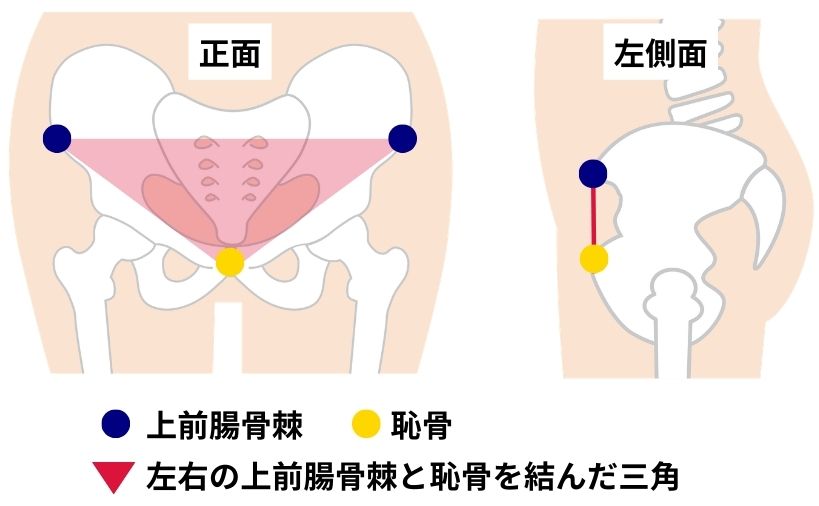
これを基準にした場合、三角形の面が床に対して垂直に近い状態が立位姿勢で理想の骨盤の傾きとされています。
個人的には2つ目の骨盤の正面の三角形(Lewinneckの三角といいます)を1つの基準としてお客様にはお伝えすることが多いです。体の正面でお客様自身も触りやすく、角度の確認がしやすいためです。
立位姿勢の「最適化」システム|姿勢制御の仕組み
ここまで骨盤の形態の個人差と、コントロールできる傾きを通して立位姿勢について触れてきましたが、その立位姿勢を制御する仕組みについても触れていきます。
脊柱を安定させるのに大きな力はいらない
意外に思われるかもしれませんが、直立姿勢の維持に必要な筋活動は、それほど大きくありません。
脊柱の安定性に関するバイオメカニクス研究では、中立姿勢(リラックスして立っている状態)では、比較的小さな筋活動で脊柱は十分に安定することが示されています。
ただし、ここで重要なのはどの筋肉がどのように協調するかです。
肋骨につく筋肉は全体的な姿勢の制御と平衡の維持に主に関与し、腰椎に直接つく筋肉(多裂筋や腹横筋など)は脊柱の安定性を高める役割を担っていることが分かっています。
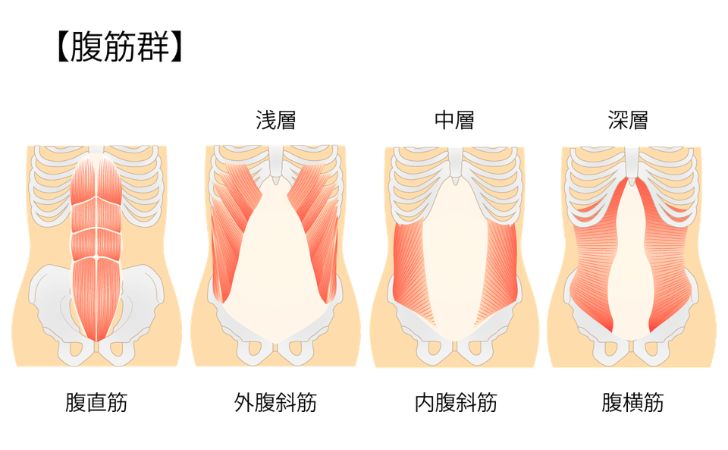
腹横筋の役割|「体幹を固める」だけではない
「体幹トレーニング」と聞くと、腹横筋(ふくおうきん)という名前を聞いたことがある方も多いかもしれません。腹横筋は腹部の最も深い層にある筋肉で、腰痛予防やリハビリの文脈でよく注目されます。
研究では、腹横筋の活性化は仙腸関節(骨盤の関節)の圧縮力を高め、骨盤の安定性に寄与することが確認されています。
また、腹横筋と骨盤底筋群の協調が骨盤弓の安定化(骨盤を骨組みとして安定させること)に重要な役割を果たすことも示されています。
このように腹横筋は骨盤を含めた体幹の安定に関与するのですが、2024年のスコーピングレビュー(系統的文献調査)では、腹部の引き込み(Abdominal Hollowing:腹横筋の選択的活性化)と腹部の固め(Abdominal Bracing:体幹筋群の共同収縮)を直接比較した研究はまだ少なく、どちらが優れているかは結論が出ていないことが報告されています。
腹横筋を例にしましたが、これはつまり、「この筋肉を鍛えれば姿勢が良くなる」という単純な話ではなく、複数の筋肉が協調して働くことが重要であり、その最適な協調パターンも個人によって異なる可能性があるということです。
感覚の統合|身体はどうやってバランスを取っているか
立位姿勢を保持するとき、身体は視覚・前庭覚(内耳の平衡感覚)・体性感覚(筋肉や関節のセンサー)の3つの感覚情報を統合してバランスを制御しています。

興味深いのは、この3つの感覚の「重み付け」は固定されていないということです。例えば、目を閉じると体性感覚(特にふくらはぎの筋紡錘からの情報)への依存度が大幅に増加することが実験で確認されています。
また、加齢によって前庭機能が低下した場合、体性感覚への依存度がさらに高まることが分かっています。
このような「感覚の重み付け直し(Sensory Reweighting)」は、私たちが無意識のうちに行っている高度な脳の情報処理です。
エネルギー最小化原理とは
さて、ここからは少し話が変わります。エネルギー最小化原理という小難しい単語が出てきましたが、簡単にいえば、私たちの身体は「省エネ」でできているという原理です。ここからはこの「省エネ」のシステムと歩行をテーマにお伝えしていきます。

身体は勝手に”ちょうどいい”を探す
私たちの身体は「省エネ」、つまりはできるだけエネルギーを節約できる動き方を自然に選んでいます。
歩行において、移動距離あたりのエネルギー消費量をCoT(Cost of Transport=輸送コスト)と呼びます。このCoTと歩行速度の関係をグラフにすると、U字型のカーブを描くことが多くの研究で確認されています。
つまり、遅すぎても速すぎてもエネルギー消費は増え、ちょうどいい速度のときに最もエネルギー効率が良くなるのです。
そして興味深いことに、私たちが日常生活で「なんとなく」選んでいる歩行速度は、このU字カーブの底(最もエネルギー効率が良いポイント)に非常に近いことが分かっています。
つまり、意識していないのに、身体が自然に「省エネの速度」を選んでいるわけです。
歩幅も腕振りも「省エネ設計」
実はこの「省エネ志向」は歩行速度だけに限りません。
2015年にカナダのDonelanらのグループが発表した研究では、人間はリアルタイムでエネルギーコストを最適化できることが示されました。実験的に歩行のエネルギーコストを変化させると、被験者は数百歩のうちにエネルギー消費が最も少ない歩行パターンに自ら収束していったのです。
その後の研究でも、歩行速度、歩調(ステップ頻度)、歩幅、腕の振りまで、人間の歩行に関するほぼあらゆるパラメータがエネルギー最小化の方向に調整されていることが確認されています。
さらに2023年の研究では、地面に穴があるような複雑な地形でも、人間は視覚情報だけで事前にエネルギーコストを予測し、最も効率的な移動戦略を選択できることが明らかになりました。
つまり、私たちの脳は、足を踏み出す前から「どう動けば省エネか」を計算しているということです。

「省エネ」だけが目的ではない
ここまでの話を踏まえますとこう思われるかもしれません。

なるほど、身体はとにかくエネルギーを節約したいってことなんですね!
しかし、「省エネ」は身体に備わっている仕組みの一側面でしかありません。「省エネ」とは別の目的を達成する仕組みも備わっているのです。
エネルギーを犠牲にしてでも守りたいもの
2022年、オーストラリア・アメリカの共同研究グループが『Proceedings of the Royal Society B』に発表した論文は、非常に興味深い実験を行いました。
被験者に2種類の歩行課題(しゃがみ歩行と坂道歩行)を体験させ、それぞれのエネルギー消費量と筋肉の負担度を測定しました。そして、エネルギー消費と筋肉負担のどちらかしか軽減できない状況を意図的に作り出し、被験者がどちらを選ぶかを観察しました。
結果は明確で、被験者は全員、エネルギー消費が約19%増加することを受け入れてでも、特定の筋肉に負担が集中しない歩き方を選んだのです。
「筋肉の使い分け」の方が大事?
この実験結果は何を意味するのでしょうか?
研究者らは、人間の歩行制御において「筋疲労の回避(division of labour)」がエネルギー節約と同等以上に重要な目的である可能性を示唆しています。
分かりやすく言い換えると、このようになります。

“全体のガソリン代(エネルギー)」を減らすこと“も大事だけれど、“特定のエンジン部品(筋肉)だけが壊れないようにすること“の方を身体は優先する場合がある
つまり、歩行は「エネルギー消費」「筋疲労の回避」「安定性の確保」など、複数の目的を同時にバランスさせる”多目的最適化”で制御されているということです。
「安定性(バランス)」と「時間」という隠れたコスト
もうひとつ重要な要素があります。それは「安定性(バランス)」です。
凸凹した不整地を歩く実験では、被験者の好む歩行速度はエネルギー的に最も効率の良い速度よりもやや遅いことが確認されています。
つまり、エネルギー効率を少し犠牲にしてでも、転ばない・つまずかないという安全マージンを確保しているわけです。

また、歩行速度の選択には「時間コスト」も関わっています。
2023年の研究では、人間は「エネルギー」と「時間」の両方を最適化するように歩行速度を決定しており、その重み付けは個人によって異なることが示されています。
まとめると、私たちの歩行は「エネルギー最小化」一辺倒ではなく、以下の複数の目的を同時に満たすように制御されているということです。
歩行に関わる4つの要素
ここまでお伝えしてきた要素を挙げると以下の4つになります。
- エネルギー効率:なるべくガソリンを節約したい
- 筋疲労の回避:特定の筋肉だけに負担を集中させたくない
- 安定性の確保:転んだり、つまずいたりしたくない
- 時間効率:目的地にそれなりの時間で着きたい
そして、これら複数の目的にどのくらいの重みを置くかは、人によって違うのです。
歩き方にも「個人の署名」がある
これはお分かりになる方もいらっしゃると思いますが、ご自身がよく知った人物であれば遠くにいてもその方の歩き方を見て「あ、〇〇さんだ!」と気がつくことがあると思います。
つまり、姿勢に個人差があるように、歩行にも大きな個人差があります。

「正常な歩行」にもパターンがある
2023年の研究では、健常者の膝関節の運動パターンを分析したところ、「正常な歩行」は単一の平均パターンではなく、複数のクラスター(グループ)に分かれることが示されています。
つまり、健康な人の「普通の歩き方」でも、いくつかの異なるタイプが存在するのです。
また、246名の健常成人(18〜91歳)を対象とした大規模な3D歩行解析研究では、歩行パラメータ(速度、関節角度、地面反力など)が年齢、性別、体格によって系統的に変化することが確認されています。
さらに別の研究では、下肢の矢状面運動パターン(歩行中の脚の前後方向の動き)は、歩行速度、性別、年齢、BMIから予測可能であることが示されています。
年齢とともに「省エネの速度」も変わる
2023年に発表された研究では、エネルギー効率が最も良い歩行速度(経済速度)は加齢とともに遅くなることが確認されています。
ただし、この変化には脚の長さが関係しており、脚の長さで正規化すると加齢の影響はより明確になります。
また、高齢者では足首の蹴り出し力(プッシュオフ)が低下し、その代償として股関節周囲の筋肉がより多く働くようになることが分かっています。これは「悪い歩き方」ではなく、加齢に伴う身体の変化に対する合理的な適応と捉えることができます。
「あなたにとっての最適」を見つけるために
さて、ここまで骨盤の形状の個人差、立位姿勢を保持する仕組み、そして歩行の無意識下でのコントロールなどについて触れてきました。
では結局、本記事をお読みのあなたに取っての最適とは、どのようなものなのでしょうか?
「画一的な正解」ではなく「個別の最適解」
ここまでの内容を踏まえると、以下のことが言えます。
- 骨盤傾斜角(PI)という生まれつきの骨格パラメータが、腰のカーブを大きく左右する
- 骨盤全体の傾き具合は意識でき、また自分で調整ができる
- 姿勢制御は複数の感覚情報の統合であり、個人の感覚特性によっても変わる
- エネルギー最小化は重要な原理だが、身体はそれだけを最適化しているわけではない
- 筋疲労の回避・安定性・時間効率なども同時に最適化されている
- 歩行パターンも年齢・性別・体格によって異なり、「正常」の中にも複数のパターンがある
やはり、「万人に共通する唯一の正しい姿勢・歩き方」は存在しないのです。
存在するのは、「あなたの骨格・筋力・年齢・生活環境に合った、あなたにとっての最適解」です。
日常で意識できるポイント
では、「個別の最適解」を見つけるために、日常生活で何を意識すれば良いのでしょうか?科学的知見と私の経験を踏まえたポイントをいくつかお伝えします。
①「楽な速度」を信じてよい
あなたが自然に選んでいる歩行速度は、エネルギー効率的にかなり良い速度である可能性が高いです。「もっと速く歩かないと」「もっとゆっくり歩かないと」と焦る必要はありません。ただし、加齢や体調の変化によって最適な速度は変わりますので、定期的に身体の声を聴くことは大切です。
②「反り腰を直す」は万人向けではない
骨盤傾斜角が大きい方は、腰のカーブが深いのが自然です。逆に、骨盤傾斜角が小さい方が無理に腰を反らせると、かえって負担が増える可能性があります。大切なのは「見た目」ではなく、痛みや不快感がない範囲で、ご自身にとって無理のない姿勢であるかどうかです。
③動きの「多様性」を大切にする
第3部でお伝えした通り、人間本来の強みは「運動の多様性(Locomotor Versatility)」です。ひとつの「正しい姿勢」にこだわるよりも、さまざまな動き方・座り方・立ち方ができる身体の柔軟性を保つことの方が重要と考えられます。
④「特定の筋肉だけ」ではなく「協調」を意識する
体幹の安定性は本記事で取り上げた腹横筋だけでなく、多裂筋・骨盤底筋・腹斜筋などが協調して初めて実現されます。特定の筋肉だけを鍛えるよりも、身体全体の協調を高める運動(ヨガ、ピラティス、水泳、ウォーキングなど)を取り入れる方が理にかなっていると考えられます。
⑤変化に柔軟に対応する
加齢に伴い、最適な歩行パターンは変化します。高齢になると足首の蹴り出し力が低下し、股関節周囲の筋肉で代償するようになりますが、これは「悪化」ではなく「適応」です。身体の変化に逆らうのではなく、変化に合わせて無理なく動ける身体を維持することを目指しましょう。
⑥骨盤の「スイートスポット」を探す
骨盤傾斜角(PI)が決める骨格枠内で、本記事で触れた左右の上前腸骨棘と恥骨を結ぶLewinnekの三角形が床に対し垂直に近い位置が機能的最適域です。このとき「丹田に自然に力が入る」感覚が生まれ、腹横筋・骨盤底筋・多裂筋が協調して仙腸関節を安定させます。PIの個人差を越えて、この「自然な力み感」が立位・歩行時の実践的な目安になります。
⑦下肢も「あなた仕様」に調整する|大腿骨の前捻角に注目して
骨盤調整に加え、大腿骨の前捻角(ぜんねんかく)も重要です。
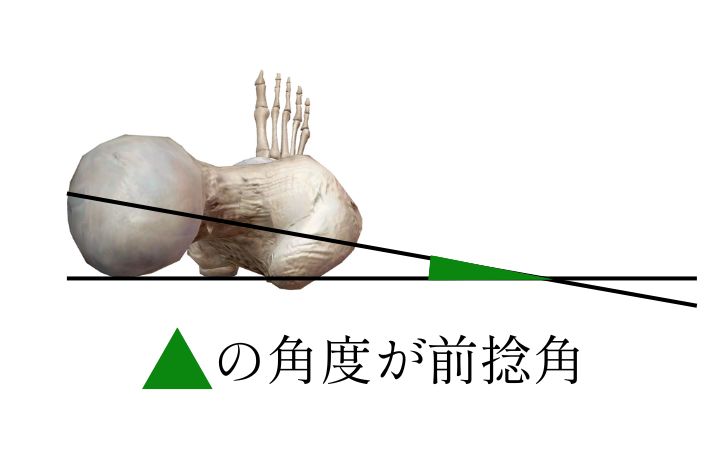
この前捻角も個人差が非常に大きい形態学上の特徴です。この前捻角に合わせて脚のポジションを調整した立位姿勢を取り、歩行するのが良いと考えています。
本記事と主旨はやや異なりますが、過去記事「股関節が硬い原因は筋肉だけじゃない!|骨格の個人差と個性を理解しよう!」をお読みいただきますと前捻角への理解が深まると思います。

身体のメンテナンスと整体の役割
ここで、整体師という視点からお伝えしたいことがあります。
整体は、直接的に「正しい姿勢」や「正しい歩き方」を作り出すものではありません。ここまでお伝えしてきたように、そもそも万人共通の「正しい姿勢」は存在しないからです。
しかし、整体は以下の点で、あなたにとっての「最適な身体の状態」に近づくためのサポートとして機能する可能性があります。
筋緊張の緩和による「選択肢の回復」
筋肉の過度な緊張は、身体が本来持っている動きの選択肢を狭めてしまいます。施術により筋緊張が緩和されると、身体がより多くの動き方を「選べる」ようになる可能性があります。
これは、前述した「多目的最適化」において、身体が最適解を見つけるための幅が広がるということです。
関節可動域の維持・改善
関節の動きが制限されると、身体は代償動作(別の部位で動きを補うこと)を行います。この代償は短期的には適応的でも、長期的には他の部位への負担増につながることがあります。
施術は関節可動域の維持・改善を通じて、身体全体の負荷分散を適切に保つことに寄与する可能性があります。
感覚入力の改善
前述の通り、姿勢制御は複数の感覚情報の統合で成り立っています。施術によって筋肉や関節の状態が改善されると、体性感覚(筋肉や関節からのフィードバック)の質が向上し、姿勢制御がよりスムーズになる可能性があります。
以上のように、整体は「正しい姿勢にする」ものではなく、「あなたの身体が、あなたにとっての最適な状態を見つけやすくなるためのサポート」という位置づけが適切だと考えています。

よくあるご質問
ここからはよくある質問に対する回答をご紹介します。これまでの復習代わりにもお読みください。

- 骨盤傾斜角(PI)は骨盤の形態学的特徴、生まれつきで成人後不変、腰椎前弯の「設計図」を決定
Legaye J, Duval-Beaupère G, Hecquet J, Marty C. Pelvic incidence: a fundamental pelvic parameter for three-dimensional regulation of spinal sagittal curves. Eur Spine J. 1998;7(2):99-103.
https://doi.org/10.1007/s005860050045 - 健常成人のPIは33°〜85°の大きな個人差、Roussouly分類で4タイプ
Schlösser TP, Shah SA, Reichard SJ, et al. Characteristics of Spinal Morphology According to the “Current” and “Theoretical” Roussouly Classification Systems in a Diverse, Asymptomatic Cohort: Multi-Ethnic Alignment Normative Study (MEANS). Global Spine J. 2024;14(2):345-356.
https://doi.org/10.1177/21925682241235611 - 腹横筋活性化は仙腸関節圧縮力↑、骨盤安定に寄与
Bazrgari B, Shirazi-Adl A, Kasra M. Seated whole body vibrations with high-magnitude accelerations relative to human anatomic segments. J Biomech. 2008;41(8):1599-1606.
https://doi.org/10.1016/j.jbiomech.2008.02.020 - 歩行速度はCoTのU字カーブ底(エネルギー最小点)に近い、省エネ選択
Peyré-Tartaruga LA, de la Rocha NB, Diefenthaeler F. Normalized economical speed is influenced by aging and not by exercise habituation. Gait Posture. 2023;106:1-7.
https://doi.org/10.1016/j.gaitpost.2023.09.123 - 歩行はエネルギー+筋疲労回避+安定性+時間の多目的最適化
Hao M, Lenoir K, Montgomery JR, et al. Humans trade off whole-body energy cost to avoid overburdening muscles while walking. Proc Biol Sci. 2022;289(1987):20221189.
https://doi.org/10.1098/rspb.2022.1189
関連記事
本記事では「機能的に”最適な”姿勢と歩行とは?」をテーマ、主に骨盤の個人差やエネルギー最小の原理といった無意識下での制御などを通して解説してきました。
本記事のほか、「姿勢・動作」シリーズの他の記事も合わせてお読みいただくと、より理解が深まると思います。
以下の連載企画の他記事や過去記事もぜひお読みください。
- 第1部:正常姿勢は本当に正しいのか?解剖学的肢位と”本来の姿勢”を整理する
- 第2部:日本人だからこの姿勢? ― 民族差・文化差と”日本人独自の歩き方”の妥当性
- 第3部:ヒト本来の歩き方はあるのか?狩猟採集民の研究から自然な歩行・走行を考える
まとめ:「あなたにとっての最適」が、最も科学的に正しい
ここまで、骨格の個人差、歩行パターンの多様性、エネルギー最小化原理、多目的最適化などについて解説してきました。最後に、重要なポイントをまとめます。
次回は、第5部「くせの科学」と銘打ちまして、動きの多様性や個人差についてに追求していきたいと思います。
神奈川県伊勢原市の整体院すいっちでは、施術だけでなく、日常の姿勢や動作(体の動かし方)を含めた指導も行っております。何か姿勢や動作についてのお悩みや疑問があればお気軽にご相談ください。
ぜひ、以下の画像をタップして当院のホームページもご覧になってみてください。

重要な免責事項:本記事は一般的な情報提供を目的としており、医学的診断や治療の代替となるものではありません。健康に関する具体的な判断や治療については、必ず医師などの医療専門家にご相談ください。本記事の内容により、ご自身の判断で医師の指示に従わないことは、健康上の重大な問題を引き起こす可能性があります。整体施術は医学的な治療ではなく、身体のメンテナンスを目的としたものです。










正しい姿勢も歩き方も”ひとつ”ではないなら、結局どうすればいいの?