

膝をかばっているうちに、腰まで痛くなってきて…

昔からの癖で、いつも同じ肩ばかり凝るんです…
このような「動きの癖」もしくは「動きの癖から波及したと考えられる症状」に関するお悩みは非常に多いです。
しかし、「癖だから直さなきゃ」と思う前に、まず知っていただきたいことがあります。それは、 動きの癖は、脳と身体がさまざまな条件のもとで「選び取った解」の一つであるということです。
今回の記事は連載企画の第5部として、「動きの癖」が生まれるしくみを運動制御の科学から解説します。関節の抵抗最小パス(最もラクな動きの道筋)や、タスク(目的の動作)に必ずしも最適化されない動きが生まれるメカニズムについて、できるだけわかりやすくお伝えします。
なお、現代の医学的・科学的観点で確認されている情報をベースにしていますが、科学的知見は常に更新されます。あくまで参考程度にお読みいただき、ご自身の身体について不安な点がある場合は、必ず医療機関でご相談ください。
もくじ
「くせ」とは何か?|運動制御の視点から
「なくて七癖」という言葉がありますように、どんなにくせがないように見える人であっても、必ず七つの(数多くの)くせを持っているものです。
では、そもそも「くせ」とは学術的にどのように捉えられているのか、基本から見ていきましょう。
人間の身体は「選択肢が多すぎる」
まず、「動きの癖」を理解するために知っておいていただきたいのが、人間の身体はとても自由度が高いという事実です。
私たちの身体には約200個以上の骨があり、それらを約260個以上の関節がつなぎ、約600個以上の筋肉が動かしています。
このような構造を踏まえると、例えば、「テーブルの上のコップを取る」というシンプルな動作でも、肩・肘・手首・指の関節とその動きの組み合わせは理論上は無数に存在します。
そこで、旧ソ連の生理学者ニコライ・ベルンシュタインが20世紀前半に提唱した、とある問題があります。

身体の関節や筋肉が多すぎて、同じ動作を実現する方法が無限にある。脳はそのなかからどうやって一つの動き方を選んでいるのだろうか?
これは「自由度問題(Degrees of Freedom Problem)」として知られています。
脳は「解の一つ」を選んでいるだけ
この自由度問題に対して、脳は非常に巧妙なやり方で対処しています。
ベルンシュタインの研究とその後の発展によれば、運動の学習には大きく3つの段階があるとされています。
- 凍結(Freezing):まずは自由に動く関節の数を減らして、身体を「固定」する段階です。例えば、初めてテニスのラケットを振るとき、全身がぎこちなく硬くなるのはこのためです。
- 解放(Freeing):慣れてくると、少しずつ関節の動きが解放されていきます。肘や手首が柔らかく使えるようになり、動きにゆとりが出てきます。
- 活用(Exploiting):さらに上達すると、重力や反動といった外力まで味方につけて、少ない力で大きな動きを生み出せるようになります。
この3段階を経て、脳は「無数にある動き方」の中から、その人にとっての「よく使う解」を選び取ります。
これが「動きのくせ」の出発点であり、要するに、癖とは、脳が膨大な選択肢の中から繰り返し選んだ「お気に入りの解」なのです。
なぜ同じ動きが「くせ」になるのか?自動化のしくみ
「動きのくせ」とは「脳が膨大な選択肢の中から繰り返し選んだお気に入りの解」だと捉えられています。
ここからは、この「くせ」の正体や「くせ」が生じる過程を見ていきましょう。
運動学習の3段階と「自動化」
動きが「くせ」になる背景には、脳による学習と自動化のプロセスがあります。
アメリカの心理学者フィッツとポズナーは、運動学習を以下の3段階で説明しました。
- 認知段階(Cognitive Stage):動きの手順を頭で考えながら行う段階です。「次は右足を出して、それから左手を…」のように意識的に動きを組み立てます。
- 連合段階(Associative Stage):練習を重ねることで、動きの一連の流れが滑らかになってくる段階です。エラーも少なくなり、動きが洗練されていきます。
- 自律段階(Autonomous Stage):もはや動きを意識しなくても自動的に実行できる段階です。歩く、自転車に乗る、箸を使うなど、日常的な動作の多くがこの段階にあります。
この3段階目の自律段階に達した動きが、いわゆる「くせ」の正体です。
脳の中で何が起こっているのか
この自動化を支えているのは、主に大脳基底核(だいのうきていかく)と小脳(しょうのう)という2つの脳領域です。

- 大脳基底核は、動きの「手順」を記憶し、繰り返しの中からよく使うパターンを「習慣」として固定する役割を担っています。特に背外側線条体(はいがいそくせんじょうたい)と呼ばれる部位が、動作の自動化に深く関わっていることが動物実験で確認されています。
- 小脳は、動きの「微調整」を担う部位です。実際の動きと「こう動くはず」という予測のズレを検出し、修正を加え続けることで、動きをより正確に、より滑らかにしていきます。
この2つの脳領域が協力して働くことで、繰り返した動きは次第に「意識しなくても実行できる自動プログラム」になります。
これが「動きのくせ」の神経科学的な背景です。
自動化のメリットとデメリット
動きの自動化には大きなメリットがあります。
- 脳のエネルギーを節約できる:自動化された動きは意識的な注意を必要としないため、脳のリソースを他のことに使えます(例:歩きながら考え事ができる)。
- 動きが速くなる:いちいち考えなくてよいので、反応が素早くなります。
- 動きが安定する:同じパターンを再現しやすくなり、動きの精度が向上します。
一方で、デメリットもあります。
- 変えにくい:一度自動化された動きは、意識的に変えようとしても元のパターンに戻りやすくなります。
- 状況変化への適応が遅れる:自動化されたパターンが、新しい状況(例:怪我の後の身体、加齢による変化)に合わなくなっても、すぐには切り替わりません。
- 不適切な動きも固定される:痛みをかばった動きなど、一時的な対処として生まれた動きパターンが、そのまま癖として定着してしまうことがあります。
関節の「抵抗最小パス」とは|身体が選ぶ「最もラクな道」
さらに、「動きのくせ」が生じる別の理論として、最適制御理論(Optimal Control Theory)というものがあります。
最適制御理論の視点
最適制御理論とは、身体は常に「できるだけラクな動き方」を探しているという考え方です。
カリフォルニア大学サンディエゴ校のエマニュエル・トドロフ博士らの研究によれば
脳は動きを計画・実行する際に、ある「コスト関数」を最小化するように動きを選んでいると考えられる!
どういうことかというと、まずこの「コスト関数」には、主に以下の要素が含まれます。
- エネルギー消費:筋肉が使うエネルギーをできるだけ少なくしたい
- 精度:目標に正確に到達したい
- 滑らかさ:急激な加速・減速を避け、なめらかに動きたい
そして、身体はこの3つをバランスよく満たす動き方を「最適解」として選び、この最適解が通る経路こそが、いわば「関節の抵抗最小パス」です。
つまり、身体は「エネルギー的に最もコストの低いルート」を通ろうとします。
脳によって生じる制御とは異なり、「動きのくせ」の主旨とは少々異なるのですが、小話として掲載しておきます。
関節の動きを見た場合でも力学的に抵抗が最小になるように体は動くことが考えられます。
例えば、手を上に伸ばそうとする時、肩関節の屈曲という動作を行います(下記イラストの左側)。

肩関節の屈曲では、上腕骨頭(二の腕の骨のうち、肩関節を構成する丸い部分)は軸回転するように回るのが理想的です。
この軸回転がスムーズに生じるには、肩関節の後方や下方のさまざまな組織(皮膚や筋肉など)が十分に伸びることが求められます。
しかし、何らかの要因によって肩関節後方や下方の組織の柔軟性が損なわれていると、肩関節の屈曲に伴って上腕骨頭は前方や上方にズレるようになり、筋肉などの組織が挟み込まれるインピンジメントが生じることがあります。
このように関節の動きに伴って痛みがある方や関節可動域に制限がある方の中には、本来のスムーズな関節運動の軌道を通らずに動いていることがありますが、これは関節周囲の組織の硬さに不均衡があることで、力学的に関節運動の際に抵抗が相対的に小さくなる方向へと動きやすくなると考えられ、現場ではしばしばこのような事例に遭遇します。
この対策としては、どのような組織が硬くなっているのかをチェックし、組織の柔軟性を回復し、関節の動かし方(体の動かし方)を修正していくことが重要です。
最小介入原則|余計なことはしない
最適制御理論の中でも特に重要なのが、最小介入原則(Minimal Intervention Principle)です。
これは一言でいうと、「目標の達成に影響しないズレは、わざわざ修正しない」という原則です。
例えば、テーブルの上のコップに手を伸ばすとき、手がコップに到達しさえすれば、肘の角度や肩の高さが毎回少し違っていても問題ありません。
このような「結果に影響しないばらつき」は、脳はあえて修正しないのです。
なぜなら、余計な修正をするとその分だけ筋肉を使い、ノイズ(ブレ)も増えてしまうからです。

運動制御の研究では、筋肉の出力が大きいほどノイズも大きくなる「信号依存性ノイズ」という現象が確認されています。
つまり、力を入れれば入れるほど動きはブレやすくなるのです。
この原則が意味するのは、「完璧に一定の動き」を目指すことは、実はエネルギーの浪費になるということです。
身体は賢く「手を抜ける部分は手を抜く」ことで、全体としての効率を最大化しているのです。
運動のばらつきは「悪」ではない
最適制御理論の中にある最小介入原則について触れましたが、「動きにばらつきがある」と聞くと、「下手」「不安定」というネガティブなイメージを持つ方もいらっしゃるかもしれません。
しかし、実はそうとも限らないというお話をしていきます。
「良いばらつき」と「悪いばらつき」
運動制御の科学では、ばらつきには2種類あることが明らかになっています。
- 「悪いばらつき」:目標への精度を下げてしまうばらつき。例えば、ダーツの的を狙っているのに毎回違う場所に当たってしまう場合のブレです。
- 「良いばらつき」:目標の達成には影響しない範囲でのばらつき。先ほどのコップの例で、手はコップに毎回正確に届いているけれど、肘の角度が毎回少しずつ違う、というような場合です。
この考え方を理論的に裏付けたのが、非制御多様体仮説(Uncontrolled Manifold Hypothesis:UCM仮説)です。
この仮説によれば、身体はタスクの成功に必要な部分のばらつきは抑制し、必要でない部分のばらつきは許容するように制御されています。

「良いばらつき」は探索の道具でもある
さらに興味深いのは、運動のばらつきが「新しい動き方を探す」道具にもなっているということです。
私たちの脳は完全に同じ動きを繰り返しているわけではなく、毎回わずかに異なる動きを試しています。
このわずかなばらつきの中から、よりうまくいった動き方を「報酬」として学習し、少しずつ動きを改善していくのです。
そして、この過程には大脳基底核が関わっていることが、近年の研究で確認されています。
つまり、動きのばらつきは単なるノイズではなく、身体が「もっと良い動き方はないか」を探索するための仕組みでもあるのです。
タスクに最適化されない動きが生まれるしくみ
ここからは、なぜ「タスク(目的の動作)に最適化されない動き」が生まれるのかについて解説します。
代償運動|身体の「助け合い」
最適化されない動きの代表的なメカニズムが代償運動(だいしょううんどう)です。
代償運動とは、ある関節や筋肉がうまく働かないとき、他の関節や筋肉が代わりに働いて動作を達成しようとする現象です。
例えば、足首の動きが制限されている場合を考えてみましょう。
- しゃがむ動作で足首が十分に曲がらない
- 膝がより深く曲がることで補おうとする
- 膝への負担が増す
- 長期的に膝に痛みが出る可能性がある

このように、身体の関節は「運動連鎖(キネティックチェーン)」として鎖のようにつながっています。
一つの関節(今回は足首)の問題が、隣接する関節に波及し、さらにその先の関節にまで影響を及ぼすことがあるのです。
痛みと回避行動|「かばう動き」の落とし穴
代償運動が特に問題になりやすいのが、痛みがある場合です。
痛みを感じると、私たちの身体は無意識に「その動きを避けよう」としますが、これは生存のために重要な防御反応です。

しかし、痛みを避ける動き(回避行動)がそのまま「癖」として定着してしまうことがあります。
研究によれば、慢性的な痛みを抱える方は
- 動きのばらつきが変化する(過度に固定されたり、逆に不安定になったりする)
- 「防御的な動き(ガーディング)」が習慣化する
- 痛みがなくなった後も、かばった動きのパターンが残る
ということが報告されています。
本来は短期的な対処として合理的だった「かばう動き」が、長期間続くことで不適応な癖になってしまうのです。
これが「タスクに最適化されない動き」が生まれる、最も身近なメカニズムの一つです。
これを踏まえると「痛みがなくなった=治った」では必ずしもないということが言えます。
痛みがなくなった後、痛かった時の動きの「くせ」が定着していないかをチェックし、定着していればそれを修正するということが重要になります。
もう1つ、著しい変形性膝関節症(へんけいせいひざかんせつしょう)の患者様を担当した時の体験談を小話をとして書き留めておきます。
私が担当した患者様は外見上ものすごいO脚になっており、体を横に揺らすようにして歩いていました。膝に痛みもあり、また関節変形があるためにバランスを取るのが難しく、このような歩き方になっていると考えられました。
この方は人工膝関節置換術を受けることになり、術後のリハビリが始まりました。
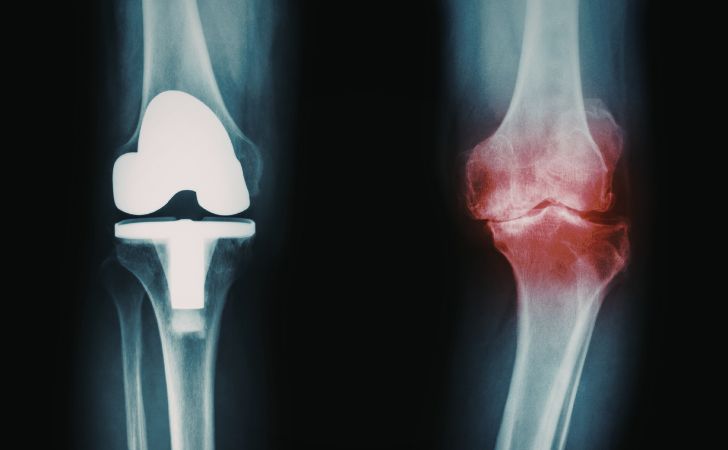
上の画像の通り、人工の膝関節になると曲がっていた関節が真っ直ぐになります。
しかし、患者様は膝がまっすぐになったにも関わらず、体を横に揺らすようにして歩くのは変わらなかったのです。
一般に関節の変形は長い時間(数年から数十年)をかけて進行し、身体はその都度、身体の状態に合わせるように動きを選択します。
文字通り長年かけて適応してきた動きが、ものの数時間で膝がまっすぐになったからといって、すぐさま新しい膝と身体に適応して歩き方まで変わることはないでしょう。
つまり、このことからも手術や各種治療で関節の状態が変化したら、それに適応した身体の使い方を練習することが重要なのであり、病院で行われるリハビリテーションの大切さを改めて実感したケースでした。
本セクションのテーマの「痛みと回避行動」の1つの事例として書き留めておきました。
骨格の個人差と「合わない動き」の押し付け
第4部でもお伝えした通り、骨格には個人差があります。
例えば、大腿骨の前捻角(ぜんねんかく)が大きい過前捻(かぜんねん)の方は、股関節が内側を向きやすい構造をしています。
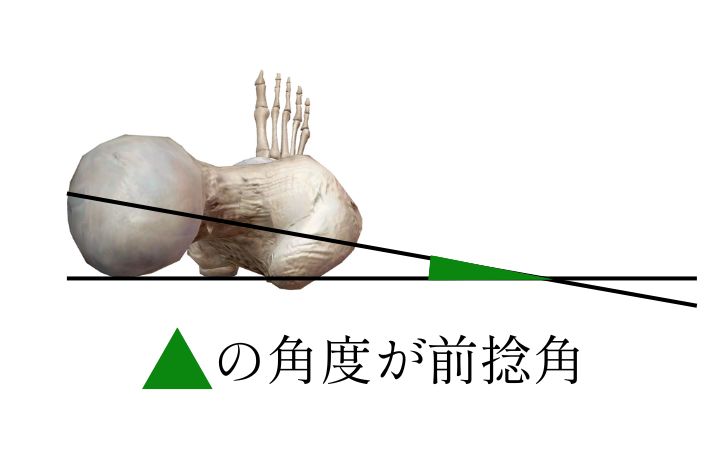
このような方に対して「つま先を外側に向けて歩きなさい」と指導すると、骨格構造に逆らう動きを強いる可能性が高くなり、
ということが起こりえます。
つまり、一般に「正しいとされる動き」がその人の骨格に合っていない場合、かえって代償運動の連鎖を生み出してしまうのです。
「くせ」との上手な付き合い方
ここまで読んでいただくとお分かりになるかと思いますが、動きの癖は必ずしも「悪いもの」ではありません。
ここからは「くせ」との付き合い方についてまとめていきます。
すべてのくせを矯正する必要はない
動きのくせとは、脳が長年かけて身体の条件に合わせて最適化してきた「その人なりの解」である可能性があります。
- 痛みがない
- 日常生活に支障がない
- 動作の目標を達成できている
という場合は、無理に矯正する必要はないと考えられます。

注意が必要な場合
一方で、以下のような場合は専門家への相談をお勧めします。
- 同じ場所に繰り返し痛みが出る:代償運動の連鎖が起こっている可能性があります。
- 動作の目標を達成できない(例:腕が上がらない、しゃがめない):関節可動域の問題や筋力の問題が隠れている可能性があります。
- 怪我の後、動き方が大きく変わった:かばう動きが固定化している可能性があります。
- スポーツやパフォーマンスの向上を目指している:より効率的な動きへの修正が有効な場合があります。
段階的なアプローチの重要性
くせを変える際に重要なのは、一度にすべてを変えようとしないことです。
これまでの内容からお分かりの通り、動きのくせは脳の自動化プログラムとして深く刻まれています。
これを変えていくには段階的なアプローチを取ると良いでしょう。
- まず気づく:自分の動きの特徴を知ること(ベルンシュタインの言う「認知段階」に戻ること)
- 一つずつ取り組む:多くの癖を同時に変えようとすると、脳の処理が追いつきません
- 繰り返す:新しい動きが自動化されるまでには時間がかかります
- 無理をしない:骨格の個人差に配慮し、「その人にとって無理のない範囲」で調整する
このような段階的で持続可能なアプローチが、結果的に最も効果的です。

段階的アプローチの落とし穴
私は小学生の頃、担任の先生にこのように言われたことを覚えています。
良い姿勢だと疲れにくいし楽なんですよ!さぁ、みんな背筋を伸ばして!!
確かに、一般的な良い姿勢は体に負担が少ない姿勢とされています。
しかし、幼少期の私は思いました。
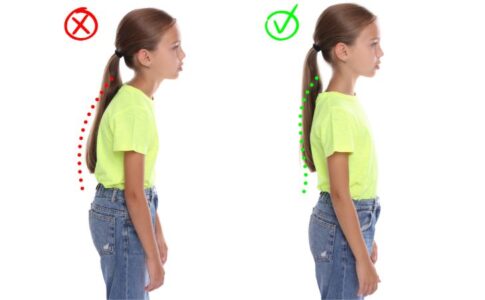
背筋を伸ばすと背中が痛いし、すぐに疲れるし、本当に楽なのかなぁ…
思い返せば幼少期の私は猫背で首が前に出た姿勢(今でいうスマホ首。スマホがない時代から)が基本となっており、お世辞にも姿勢が良いとは言えませんでした。
ここに上述した段階的アプローチの落とし穴があります。
姿勢や動きのくせを変えていくということは、今までに使っていなかった部位(筋肉や関節)を使うことが多く、その場合はその部位に負荷(ストレス)を加えることにもなります。
つまり、その負荷に耐えられるように体が適応する(筋肉が鍛えられる、動きに慣れるなど)には、それ相応の時間がかかるのです。
段階的なアプローチは数週間~数か月の継続的な練習が必要とされています。
身体のメンテナンスと整体の役割
ここで、整体師という視点からお伝えしたいことがあります。
整体の施術は、動きの癖を直接的に「矯正」したり、「治療」したりするものではありません。
しかし、整体の施術は、以下の点で間接的に動きの改善をサポートできる可能性があります。
筋肉の緊張緩和による関節可動域の改善
筋肉が過度に緊張していると、関節が動ける範囲が制限されます。
整体の施術により筋肉の緊張が緩和されることで、関節本来の可動域が使いやすくなり、代償運動の必要性が減る可能性があります。
感覚入力(固有受容感覚)への働きかけ
私たちの脳は、筋肉や関節からの感覚情報(固有受容感覚)をもとに身体の位置や動きを把握しています。
整体の施術を通じて身体に適切な刺激が加わることで、脳への感覚入力が変化し、動きの「気づき」を促すきっかけになる可能性があります。
リラクゼーション効果による防御反応の軽減
痛みや緊張が続くと、身体は防御的な状態(ガーディング)を維持します。
施術によりリラクゼーション効果が得られると、この防御反応が軽減され、より自然な動きが出やすくなる可能性があります。
以上のように、整体は「癖の矯正」ではなく、「身体が本来持っている動きやすさを取り戻すサポート」という位置づけが適切です。

よくあるご質問
ここからはよくある質問に対する回答をご紹介します。これまでの復習代わりにもお読みください。

- 人間の身体は自由度が高く、同じ動作には無数の実現方法がある。
Latash ML. Stages in learning motor synergies: a view based on the equilibrium-point hypothesis. Hum Mov Sci. 2010;29(5):642-654.
https://pmc.ncbi.nlm.nih.gov/articles/PMC2891849/ - 運動学習は認知段階→連合段階→自律段階の3段階をたどり、自律段階に達した動きが「くせ」として自動化されたパターンになる。
Leone C, Feys P, Moumdjian L, D’Amico E, Zappia M, Patti F. Cognitive-motor dual-task interference: a systematic review of neural correlates. Front Hum Neurosci. 2017;11:103.
https://pmc.ncbi.nlm.nih.gov/articles/PMC5385266/ - 大脳基底核は習慣化・自動化された運動シーケンスの実行に関与し、小脳は予測と誤差修正を通じて動きの微調整を行う。
Graybiel AM. Habits, rituals, and the evaluative brain. Annu Rev Neurosci. 2008;31:359-387.
https://pmc.ncbi.nlm.nih.gov/articles/PMC2609907/ - 脳はエネルギー・精度・滑らかさなどの「コスト」を最小化するように運動を計画する。目標達成に影響しないばらつきには積極的には介入しない(最小介入原則)。筋出力が大きいほどノイズも増える(信号依存性ノイズ)。
Todorov E. Optimality principles in sensorimotor control. Nat Neurosci. 2004;7(9):907-915.
https://pmc.ncbi.nlm.nih.gov/articles/PMC1488877/ - 運動のばらつきにはタスク達成を邪魔する「悪いばらつき」と、タスクに影響しない「良いばらつき」がある。
Wu HG, Miyamoto YR, Gonzalez Castro LN, Ölveczky BP, Smith MA. Temporal structure of motor variability is dynamically regulated and predicts motor learning ability. Nat Neurosci. 2014;17(2):312-321.
https://pmc.ncbi.nlm.nih.gov/articles/PMC3936087/ - ある関節・筋の制限に対し他の部位が代償する「代償運動」が起こる。痛みがあると回避行動・ガーディングが習慣化し、痛みが軽減した後もかばった動きが残ることがある。
Varela-Armas JL, et al. Gait variability and relationships with fear, avoidance, and pain in adolescents with chronic pain. Clin J Pain. 2021;37(5):365-373.
https://pmc.ncbi.nlm.nih.gov/articles/PMC8453630/
関連記事
本記事では「動きのくせのメカニズム」について解説してきました。
本記事のほか、「姿勢・動作」シリーズの他の記事も合わせてお読みいただくと、より理解が深まると思います。
以下の連載企画の他記事や過去記事もぜひお読みください。
- 第1部:正常姿勢は本当に正しいのか?解剖学的肢位と”本来の姿勢”を整理する
- 第2部:日本人だからこの姿勢? ― 民族差・文化差と”日本人独自の歩き方”の妥当性
- 第3部:ヒト本来の歩き方はあるのか?狩猟採集民の研究から自然な歩行・走行を考える
- 第4部:機能的に最適な姿勢と歩行とは?|エネルギー最小化原理と個人差の視点から



まとめ:「あなたにとっての最適」が、最も科学的に正しい
ここまで、動きの癖が生まれるしくみについて、運動制御の科学をもとに解説してきました。最後に、重要なポイントをまとめます。
本記事を通して触れてきたように、動きのくせに悩んでいる方は、まず「それが本当に問題なのか」を見極めることが大切です。
そのうえで必要(痛みがある、目的が達成できない等)があれば、専門家や医療機関に相談しながら、焦らず段階的に取り組んでいきましょう。
次回は、第6部「”正常発達”をどう見るか? 」と銘打ちまして、くせが生じる1つのきっかけにもなる乳幼児の運動発達・文化差・個人差についてに追求していきたいと思います。
神奈川県伊勢原市の整体院すいっちでは、施術だけでなく、日常の姿勢や動作(体の動かし方)を含めた指導も行っております。何か姿勢や動作についてのお悩みや疑問があればお気軽にご相談ください。
ぜひ、以下の画像をタップして当院のホームページもご覧になってみてください。

重要な免責事項:本記事は一般的な情報提供を目的としており、医学的診断や治療の代替となるものではありません。健康に関する具体的な判断や治療については、必ず医師などの医療専門家にご相談ください。本記事の内容により、ご自身の判断で医師の指示に従わないことは、健康上の重大な問題を引き起こす可能性があります。整体施術は医学的な治療ではなく、身体のメンテナンスを目的としたものです。











歩き方がおかしいって言われるんですけど、直し方がわかりません…